
Introduction
The ESP32 PLC 14 is a programmable logic controller (PLC) that utilizes an ESP32 microcontroller and features a total of 14 inputs and outputs. Among these, there are 4 digital outputs, 7 digital inputs, 2 analog inputs, and 1 relay output.
The ESP32 PLC 14 is a powerful and versatile industrial controller that offers a wide range of functionalities. In this article, you will learn more about its pin-out features, measuring aspects such as maximum switching frequency and rise or fall times.
Understanding these aspects is crucial for interacting with external peripherals and developing applications that requires precise timing.

Requirements
To measure the following specifications, we have used the following products:
- If you want to measure the open source based PLC characteristics, you will also need a precise oscilloscope capable of reading at the 100ns scale.
Digital Outputs
The following code creates a task named "Task1" in a system using FreeRTOS. The
task toggles the pin Q0_0, configured as an output, between a high and low state every 10 ms. This
oscillation pattern can control external devices connected to the pin.
The task has a priority of 25 and a stack size of 10000 bytes.
TaskHandle_t Task1; |
The available digital output pins are defined between Q0_0 and Q0_3.
Output frequency | Period | Delay | Duty cycle |
19,53 kHz | 51 μs | 25 μs | 82,23 % |
333,3 Hz | 3 ms | 1,5 ms | 50 % |
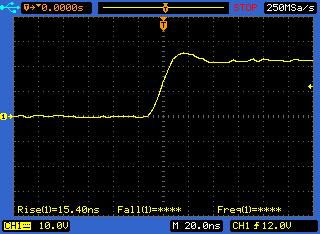
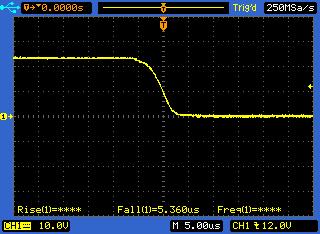
Rise time | Fall time |
15,40 ns | 5,36 μs |
|
|
The first digital output operates at a high frequency of 19.53 kHz, with a short period of 51 μs and a relatively high duty cycle of 82.23%. In contrast, the second digital output exhibits a lower frequency of 333.3 Hz, featuring a longer period of 3 ms and a balanced duty cycle of 50%. These distinctions in frequency and duty cycle suggest different operational characteristics, catering to varied application requirements, from rapid switching to a more balanced state distribution for external device control.
The rise time for the signal is exceptionally fast at 15.40 ns,
indicating how quickly the signal transitions from low to high. In
contrast, the fall time is significantly slower at 5.36 μs, suggesting a
comparatively slower transition from high to low. These observations
highlight the asymmetrical behavior of the signal, with a much quicker
rise than fall time, which could impact the signal's stability and
response time in certain applications.
Digital Inputs
The following code creates a task in a system using FreeRTOS to measure the
execution time of a digitalRead operation on a specific pin. Variables
for maximum and average time are defined, the task is set up to read the
pin a specified number of times, the execution time of each operation
is measured, and the maximum and average time are printed via serial
communication. Once the task is completed, it deletes itself, thus
ending the application.
TaskHandle_t Task1; |
The available digital input pins are defined between I0_0 and I0_6. Moreover, pins I0_7 and I0_8 can also be used as digital.
Average (μs) | Max time (μs) | |
| Digital input | 455 | 660 |
This approach allows for accurate timing analysis of digital input operations. In a specific scenario where the digital input pin I0_7 is being monitored, the average execution time is measured at approximately 455 microseconds, with a maximum execution time of 660 microseconds.
Analog Inputs
The following code creates a task in a system using FreeRTOS to measure the
execution time of an analogRead operation on a specific pin. Variables
for maximum and average time are defined, the task is set up to read the
pin a specified number of times, the execution time of each operation
is measured, and the maximum and average time are printed via serial
communication. Once the task is completed, it deletes itself, thus
ending the application.
TaskHandle_t Task1; |
The available analog input pins are defined as I0_7 and I0_8.
As a | Average (μs) | Max time (μs) |
Digital input | 1 | 23 |
Analog input (4-20mA) | 94 | 524 |
Analog input (0-10V) | 90 | 517 |
In summary, digital input operations on an ESP32 PLC 14 I/Os exhibit low latency and consistency, with an average of 1 μs and a maximum of 23 μs. Analog input readings, whether in the 4-20mA or 0-10V range, show higher execution times, averaging 94 μs and 90 μs respectively, with peaks up to 524 μs and 517 μs, indicating slower and more variable performance compared to digital inputs.
Summary
Inputs
Input type | Sampling frequency - Average | Sampling frequency - Highest read time |
Digital (IX.0-6) | 455 μs | 660 μs |
| Digital (IX.7-8) | 1 μs | 23 μs |
Analog (IX.7-8) | 94 μs | 524 μs |
Outputs
Output type | Maximum stable frequency | Signal Frequency - Maximum | Rise time | Fall time |
Digital (QX.0-3) | 333,3 Hz | 19,53 kHz | 15,40 ns | 5,36 μs |
Conclusion
The ESP32 PLC displays a wide range of performance characteristics across its inputs and outputs. Digital inputs, spanning IX.0-6, showcase moderate read times with an average sampling frequency of 455 μs and a maximum of 660 μs, while the faster IX.7-8 inputs demonstrate rapid response times averaging 1 μs and peaking at 23 μs. Analog inputs in the IX.7-8 range exhibit slower read times, averaging 94 μs and peaking at 524 μs, emphasizing a longer duration for analog signal processing. On the output side, digital outputs (QX.0-3) can achieve a maximum stable frequency of 333.3 Hz and signal frequencies up to 19.53 kHz. However, these outputs display asymmetrical behavior with a fast rise time of 15.40 ns and a slower fall time of 5.36 μs. This diverse array of characteristics underscores the versatility of the ESP32 PLC, requiring careful consideration and optimization to meet specific application demands effectively.
In conclusion, the ESP32 PLC with its 14 I/Os offers a plethora of
features and precise timing capabilities, rendering it a robust and
versatile choice for various applications. Understanding the pin-out
characteristics, including maximum switching speed, rise and fall times,
and read times, is crucial for seamless integration with external
devices. The PLC has different performance features for its digital outputs,
digital inputs, and analog outputs. These aspects need careful
consideration when developing applications. By using these features well
and paying attention to their details, the ESP32 PLC can give reliable
and accurate results for industrial automation and control needs.